

/image%2F0550998%2F20220610%2Fob_1e6435_metropolis.jpg)

BADGER, le robot en question, est décrit comme un « système robotique souterrain automatisé capable de creuser, manoeuvrer, se localiser, cartographier et naviguer dans les sous-sols et qui sera équipé pour la construction horizontale et verticale de conduits et canalisations stables. »
C’est d’ailleurs ce que son nom laisse entendre. BADGER est l’acronyme pour « roBot for Autonomous unDerGround trenchless opERations, mapping and navigation. »
Pas si facile à la première lecture… Alors, on vous explique comment ça marche.
Quels sont les problèmes concrets auxquels BADGER tente de répondre ? Actuellement, les sociétés de construction utilisent déjà des machines pour excaver les sous-sols pour y faire passer des conduis ou des câbles. Seulement, ces équipements connaissent des limites. Ils ne sont d’une part pas encore capables de desceller et d’esquiver des rochers, des conduis, des racines et n’importe quels obstacles qui croisent leur chemin : il dépend encore de l’humain pour savoir où creuser.
D’autre part, les machines actuelles sont pensées pour travailler verticalement ou horizontalement et non de manière aléatoire, ce qui les empêche de créer des réseaux souterrains tortueux.

La Team BADGER se regroupe chez l’un de ses partenaire : Trakto-Technik
BADGER, lui, devrait être capable de creuser des réseaux sinueux grâce à la visualisation et à la cartographie 3D des souterrains.
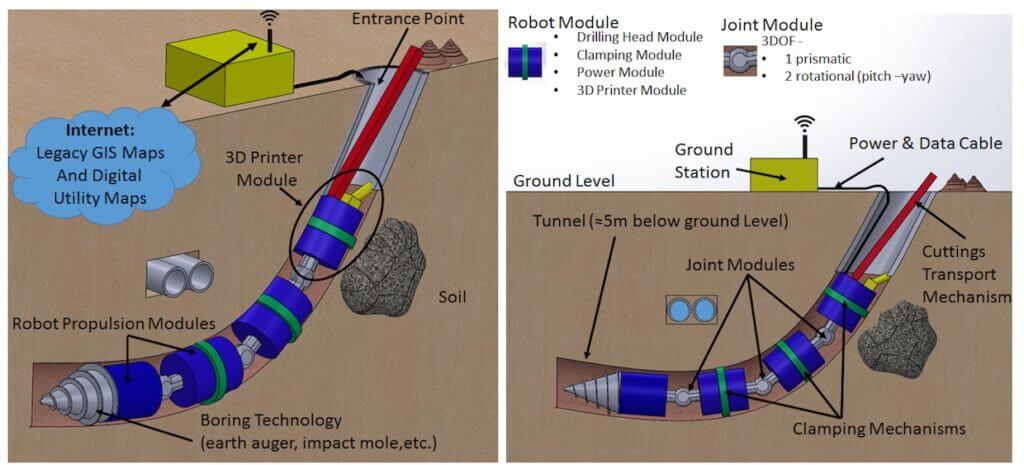
Comme le montre l’image ci-dessous, le système de forage serait situé à l’avant, tandis que l’arrière sera doté d’une imprimante 3D permettant la consolidation directe du passage emprunté.
On s’imagine donc que dans l’utilisation des technologies d’impression 3D, BADGER ne propose aucune nouveauté fulgurante.
La cartographie 3D permise par les multiples capteurs servira à l’imprimante 3D pour consolider le forage.
Le robot fonctionne à l’image d’un vers de terre qui ondule.
La partie arrière du robot vient se cramponner à la paroi fraichement forée et pousse la section avant du robot. La pression exercée par l’arrière permet à la foreuse de creuser et d’avancer. La partie avant ayant terminé de s’allonger, elle vient s’agripper à son tour et tirer la partie arrière du robot.
Lentement, car c’est lors de ce processus que l’imprimante 3D imprimera, étape par étape, en fonction de la cartographie 3D obtenue.
Pour se déplacer, BADGER utilise de nombreux détecteurs, notamment la technologie de radar pénétrant. Cela lui permet d’opérer de manière automatisée et de détecter assez tôt les obstacles qui pourraient venir perturber son avancée afin de les contourner.
L’avantage incontestable que propose BADGER est la possibilité de forer nuit et jour, sous des villes, sans avoir à perturber la circulation, mais surtout, de construire des canalisation en même temps grâce à l’imprimante 3D qu’il transporte.
BADGER, ses fonctions, son design et ses composants
Le projet devrait d’abord être exploité dans des proportions restreintes afin de se concentrer sur l’excavation de conduits pour l’impression de câbles et de canalisations explique Carlos Balaguer, professeur de l’Université Carlos III de Madrid et coordinateur du projet. L’objectif principale est pour l’instant que la la machine soit capable de forer à 4 mètres de profondeur, en maintenant une vitesse d’environ 2 mètres par heure. S’il est rempli, Carlos Balaguer est optimiste quant à la possible augmentation de la vitesse et de l’échelle de fore.
Pour avoir plus d’informations sur le projet, rendez-vous sur le site officiel de Badger ICI.
Que pensez vous de cette nouvelle méthode de forage ? N’hésitez pas à nous faire part de votre avis dans les commentaires ou à en débattre avec les membres du forum 3Dnatives.



/http%3A%2F%2Fpic.clubic.com%2Fv1%2Fimages%2F1516498%2Fraw%3Fwidth%3D1200%26fit%3Dmax%26hash%3D8de1c22f88ae8e95ed9865b9427b51e5a44724af)
/http%3A%2F%2Fwww.3dnatives.com%2Fwp-content%2Fuploads%2Fchaise.jpg)
/http%3A%2F%2Fwww.3dnatives.com%2Fwp-content%2Fuploads%2Fmx3D3.jpg)
/http%3A%2F%2Fwww.3dnatives.com%2Fwp-content%2Fuploads%2Fbridge3.jpg)
/image%2F0550998%2F20240422%2Fob_fe11f7_ecran-2024-04-22-a-08-42-08.jpg)
/image%2F0550998%2F20240421%2Fob_d32693_ecran-2024-04-21-a-08-40-27.jpg)
/image%2F0550998%2F20240416%2Fob_d38122_iu.jpeg)
/image%2F0550998%2F20240407%2Fob_57849f_iu.jpeg)